Основные параметры полета в реальном времени – телеметрия для квадрокоптера
Специальный модуль, предназначенный для вывода информации о состоянии полета с беспилотника на пульт управления или экран, получил название телеметрия для квадрокоптера. Эта современная тенденция ежедневно набирает популярность, поскольку есть возможность отслеживать перемещения дрона в реальном времени, видеть, что сейчас находится перед камерой устройства.

Телеметрические системы предназначены для трансляции параметров с бортовой видеокамеры коптера на компьютер, очки, телефон. Зависимо от разновидности используемой системы устанавливаются несколько вариантов модулей:
• Выделенный – используется свой набор датчиков, экран и передатчик сигнала.
• Встроенный – информация передается с помощью протокола пульта.
• OSD – вывод данных непосредственно на транслируемое видео.
• Установка двухстороннего модема – одна часть остается у пилота, вторая подключается к контроллеру полета.
Таким образом, применение телеметрии дает возможность узнать расстояние коптера от места взлета, скорость, режим полета, количество GPS-передатчиков в поле видимости беспилотника и другое. При этом проводится не только контроль характеристик движения, но и получается удивительной красоты съемка окружающих пейзажей.
Телеметрия для APM
Модули телеметрии (в дальнейшем «телеметрия») применяются, в основном, для контроля за коптером с земли. Имеется возможность подключить модуль к IBM совместимому ПК (самый обычный ваш ПК, на котором крутится Windows), соответственно ноутбуку, планшету на Android, телефону. Эти устройства будем называть наземной станцией. Один модуль подключается к плате APM на комтере, а второй к наземной станции. Также телеметрию можно использовать для управления коптером с земли, например полет на нужную точку, переключение режима полета, возврат домой. Можно зафиксировать и в дальнейшем посмотреть лог полета на карте Google. Удобно контролировать и настраивать практически все параметры. Пожалуй единственное, что нельзя сделать с использованием модуля — так это загрузить прошивку на контроллер APM. Все остальное рекомендую делать с использованием модуля взамен USB кабелю, подключаемому к ПК. Это дает мобильность, удобность, позволяет избавиться от лишних проводов, позволяет экономить время, требуемое на настройку.
Разработчик APM предлагает нам купить 3DR Radio. На самом деле вариант отличный для тех, кто не экономит. Мой выбор пал на более дешевые аналоги, которые полностью взаимозаменяемы с оригинальным модулем.
Из таковых имеются комплекты из 2х модулей на 915 и 433Мгц, например на RCTimer.com и HobbyKing.com:
Данные модули имеют максимальную мощность работы 100мВт. Дальность действия, с уверенным приемом, на практике 300-700м, чего вполне хватает для близкого полета без FPV оборудования (First Person View — полеты с видом от первого лица). Имеется настройка частоты и идентификатора канала, чтобы не мешать друг другу при совместных полетах несколькими пилотами.
Настройку модулей рассмотрим дальше…
Update 29.06.2014. Видеоинструкция от Юлиана. Использование телеметрии раскрывает огромный функционал Arducopter.
В этом видео наглядно показаны возможности Ардукоптера с использованием телеметрии, программы Droidplanner и устройства Android. Так же в конце видео по шагам показан процесс настройки FailSafe с последующим возвратом домой.
Если вы нашли ошибку на странице, то нажмите Shift + Enter или нажмите здесь, чтобы уведомить нас.
Записки программиста
Прокачиваем квадрокоптер: GPS, FPV и телеметрия
Ранее в заметке Как я собирал свой первый квадрокоптер на базе PixHawk была описана, так сказать, базовая комплектация квадрокоптера — полетный контроллер, рама, ESC, моторы, пропеллеры, и так далее. Это минимум, необходимый для получения чего-то, что летает. Однако на таком квадрокоптере вы далеко не улетите, так как по мере удаления от вас он очень быстро превращается в небольшое черное пятнышко на небе. Да и не очень-то безопасно на нем летать. В частности, при потери связи с аппаратурой или сильном разряде аккумулятора лучшее, что может сделать квадрокоптер — это успеть автоматически приземлиться (в реку, на дерево, или кому-нибудь на голову). Давайте же выясним, как можно решить эти проблемы.
Ниже приведен полный список новых компонентов, использованных мной в квадрокоптере. Забегая немного вперед, отмечу, что вам может понадобится далеко не все из этого списка.
Суммарная стоимость перечисленных компонентов составила 225$ (по курсу на момент покупки) с доставкой в Россию. Как можно заметить, в наборе две камеры. Mobius Action Camera с широким углом обзора была установлена впереди квадрокоптера в фиксированном положении, а камеру из набора для FPV я установил внизу квадрокоптера, на управляемом при помощи двух серводвигателей подвесе. На первых порах можно обойтись и без дополнительной экшн-камеры, и, соответственно, без переключателя между камерами, да и большинства других наворотов. Строго говоря, из приведенного списка только первые три позиции являются действительно обязательными. Их общая стоимость составляет 98$.
Примечание: Еще из сравнительно недорогих, но качественных экшн-камер, пригодных для FPV, большой популярностью пользуются камеры под брендом RunCam.
Вес квадрокоптера в собранном виде составил 1.45 кг. Выглядит он как-то так:

Интересно, что при этом квадрокоптер влез в сумку 43 x 40 x 19 см (понятное дело, со снятыми винтами) вместе с аппаратурой, экраном, запасной батареей, зарядным устройством и ремкомплектом. Вес собранной сумки составляет 5.2 кг. То есть, вполне приемлемо для транспортировки даже общественным транспортом, не говоря уже об автомобиле.
Как вы к этому моменту уже могли догадаться, я не стану утомлять вас нудными подробностями на тему что к чему подключается и как настраивается в APM Planner. Там все более-менее интуитивно понятно, к тому же, есть множество видео на YouTube. Ограничусь лишь несколькими замечаниями.
Начну с того, что я перешел на аппаратуру RadioLink AT9S, подаренную мне на день рожденья. Она оказалась существенно лучше моей предыдущей RadioLink T8FB. Во-первых, у нее 10 каналов, а не 8. Во-вторых, она имеет экранчик и может быть полностью настроена в полевых условиях, безо всякого компьютера и кривого конфигуратора под Windows с интерфейсом на китайском языке. В-третьих, у нее не срывает USB-разъем или иные компоненты. В-четвертых, в нее нормально влезает аккумулятор, а не впритык и с большим усилием. Наконец, для нее есть модуль телеметрии (см выше), который превосходно интегрируется с PixHawk. Вся телеметрия (GPS-координаты, скорость, высота, заряд аккумулятора, режим полета, …) выводится на экранчик RadioLink AT9S. В общем, правду говорят — лучше сразу брать нормальную аппаратуру.
Начиная заниматься авиамоделизмом, я не мог понять, зачем может понадобится больше восьми каналов. Давайте посчитаем:
Итого 8 каналов занято. Если дополнительно понадобится, например, управлять подсветкой или шасси, каналов уже не хватит. В моем случае остались неиспользуемыми каналы 8 и 9. На них я повесил переключатели SwD и SwH, на будущее.
Еще раньше я думал, что GPS в квадрокоптере — это что-то прикольное, но не обязательное. Сейчас же я больше склоняюсь к мысли, что без него летают только ненормальные (ну или, понятно, владельцы гоночных квадрокоптеров, но это совсем другая история). Потому что GPS-модуль стоит в районе 20$ и позволяет:
Что же касается самого FPV, тут мне как-то нечего особо добавить. Картинка отображается, камеры переключаются, подвес вращается. Можно смотреть, что там происходит внизу с высоты птичьего полета, а при желании — даже записывать. Прикольно.
По большому счету, это все, чем я хотел сегодня поделиться. Сожалею, что заметка получилась несколько сумбурной. Если у вас возникли какие-то вопросы, я постараюсь ответить на них в комментариях.
А летаете ли вы по FPV и если да, то какие модули для этого используете?
FPV OSD для квадрокоптера, что это и как выбрать

В этой статье мы раскроем вопрос о OSD FPV квадрокоптера, зачем оно нужно, как выбрать и как установить. На сегодня OSD является неотъемлемой частью системы даже в гоночных квадрокоптерах.
Что такое OSD?
OSD — это On Screen Display, что в переводе с английского — информация на экране. Простыми словами, OSD — это информация, которая накладывается на видеопоток, и вы это все видите на экране шлема или в очках.
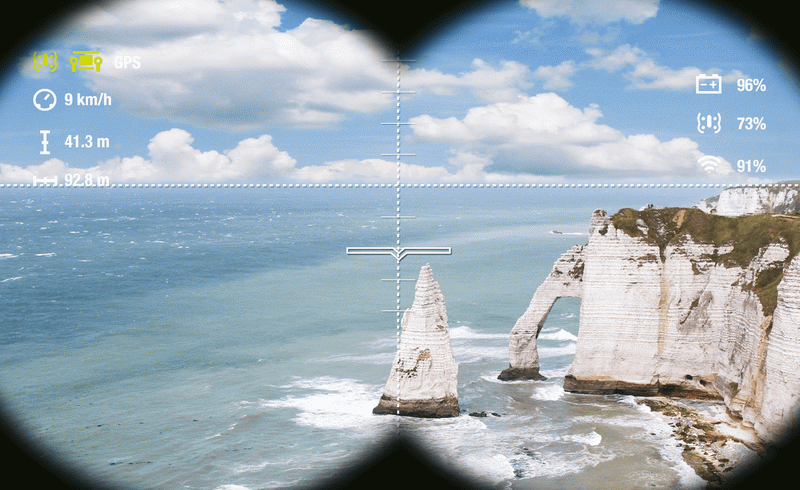
Пример того, какую информацию можно выводить на экран:

OSD fpv может быть как встроенным в оборудование квадрокоптера, так и представлять собой отдельную внешнюю плату, которую вы подключите к полетному контроллеру и к камере. Благодаря этой функции вы сможете контролировать различные параметры дрона в режиме реального времени и в полете.
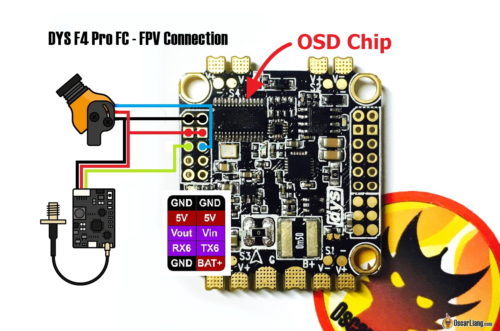
 Пример внешней платы OSD
Пример внешней платы OSD  Пример встроенного в полетный контроллер OSD
Пример встроенного в полетный контроллер OSD
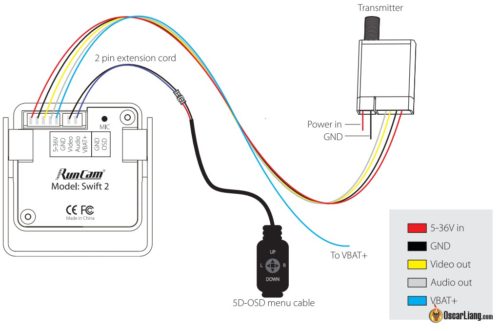
 Пример OSD в камере FPV
Пример OSD в камере FPV
На экран шлема или очков вы сможете выводить любую информацию, которую может получить ваш квадрокоптер, например, напряжение аккумулятора, высота; если есть GPS, то сможете видеть скорость и в каком направлении летит ваш дрон.
Конечно, OSD не обязателен для полетов по FPV, но это очень полезный инструмент, чтобы всегда быть в курсе состояния квадрокоптера и избежать различных проблем — например, вы всегда будете в курсе напряжения аккумулятора и сможете вовремя совершить посадку.

Какие данные показывает OSD на экране?
OSD может выводить различную информацию, какую именно, опишем ниже.
Напряжение аккумулятора (Battery Voltage)
Одна из самых важных и нужных функций, в основном это решающая функция, ради которой многие пилоты устанавливают платы OSD на гоночные дроны. Эта функция есть во всех ОСД и отображает текущее напряжение аккумулятора на экране очков или шлема.
При резком газе у аккумулятора также резко падает и напряжение, из-за чего вы будете видеть предупреждение на экране о низком напряжении и необходимости посадки, но после того, как вы убавите газ, напряжение стабилизируется.
Таймер (Timer)
Во многих OSD есть два таймера — время полета и время во включенном состоянии. Таймер полета привязан к режимам полета — как только вы переключаетесь в АКРО, стабилизацию, горизонт и т. д., включается таймер полета. Полезная функция для расчета примерного времени полета.
Датчик тока (Current sensor)
Многие путают его с напряжением аккумулятора (Battery Voltage), но этот параметр показывает, сколько потребляется тока на данный момент и сколько в общем потреблено mAh. Поэтому этот параметр является более точным индикатором того, сколько в аккумуляторе осталось заряда.
Отображает мощность сигнала в процентах. Полезная функция для съемочных самосборных дронов и дальнолетов. Чем дальше будете лететь, тем слабее будет уровень сигнала.
Предупреждения (Warning)
Многие OSD имеют функцию предупреждения на экране, например, сигнализирующую о низком заряде или низком проценте RSSI. Это очень удобно, если вы залетались и не заметили, как заряд приблизился к критическому порогу. Если вы настроите сигнализацию на экране при достижении определенного порога, вам на экране в середине (или там, где вы расположите) будет появляться надпись о низком заряде и необходимости посадки или другое предупреждение, в зависимости от настроек.
Режим полета (Flight Mode)
Отображает на экране, если, конечно, вы это настроите, текущий режим полета. Удобно для новичков или для тех, кто летает в 3 и более режимах, в основном это у съемочных квадрокоптеров. Также нужная функция, чтобы не было такой ситуации: вы забыли, что включили режим АКРО, но думаете, что летите в режиме стабилизации — сделали крен вправо, а дрон не выравнился и начинает падать.
Нужная функция для дальнолетов и съемочных дронов. Как правило, на гоночные дроны GPS не ставят по причине коротких дистанций полетов. Функция GPS будет работать только при наличии на вашем дроне этого датчика. Функция показывает такие данные, как: координаты дрона, скорость, высота (хотя высота будет точнее при использовании датчика барометра или сонара) и направление движения по отношению к точке взлета — вам будет показывать стрелка в направлении, где вы находитесь.
Линия горизонта (Artificial Horizon)
Все, наверное, видели из фильмов и документалок из кабины пилотов линии на экране, которые меняли положение в зависимости от положения самолета? Эта функция делает то же самое. В середине экрана вы будете видеть линию горизонта, которая будет помогать вам выравнивать дрон, опираясь на положение линии. Данные берутся с акселерометра
Выглядит это вот так:

Какое бывает OSD?
По типу соединения:
Внешняя плата OSD
Внешние OSD платы подразделяются на:
Независимые представляют из себя отдельную внешнюю плату, которая не подключается к полетному контроллеру, а подсоединяется только к камере и видеопередатчику. Как правило, такие платы могут подключаться к GPS и другим датчикам. Хорошими независимыми OSD считаются бренды Skylark и Super Simple OSD.
Зависимые — берут всю информацию у полетного контроллера через последовательный порт RX\TX и просто накладывают ее на видеопоток, сами ничего не обрабатывают.
В качестве хорошей платы приведем пример minimOSD от компании HobbyKing. Все данные эта плата берет у полетного контроллера, что расширяет возможности вывода различной информации, ведь ПК обрабатывает все данные, которые может получить от компонентов дрона.
Гибридные OSD можно подключать к полетному контроллеру, а можно не подключать. Если не сделаете этого, то, например, там будут данные о RSSI и напряжении, а если подключите к ПК, то будут доступны все данные, которые может обработать полетный контроллер, например, GPS. Преимущества очевидны.
Примеры подключения внешней платы OSD
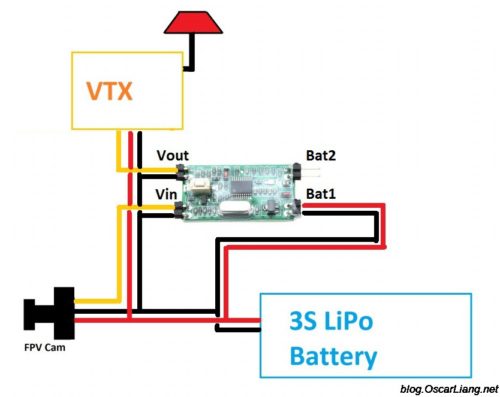
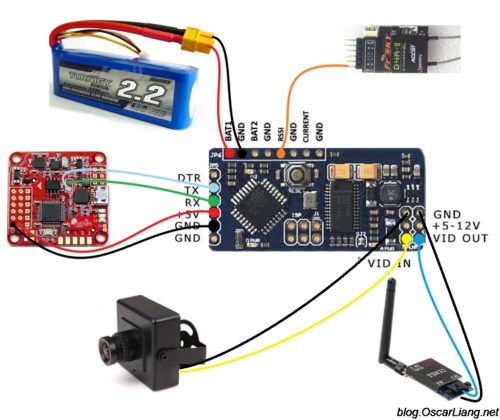
Подключение внешней независимой платы OSD
Простой пример подключения внешней платы OSD. В пример взята плата OSD Hobbyking Super Simple. Подключение в цепь с FPV камерой, видеопередатчиком и аккумулятором 3S LiPo. Есть возможность принимать значение напряжения второго аккумулятора с помощью порта Bat2:
Подключение внешней гибридной платы OSD
Здесь для примера плата MinimOSD, которая отображает и считывает сама уровень сигнала RSSI и напряжение аккумулятора. Но, если вы подключите к ней еще и полетный контроллер (он изображен уже подключенным слева, красный), то данных будет больше. Например, если к ПК подключен датчик GPS, то данные с датчика вы сможете выводить на экран.
Встроенное в полетный контроллер OSD
Такое OSD в основном есть в полетных контроллерах Betaflight, но на сегодня все больше производителей тоже начинают интегрировать эту плату в свои ПК:
Встроенное в FPV камеру OSD
Такое ОСД отличается скудным набором функций, обычно оно ограничивается таймером и датчиком напряжения аккумулятора, хотя для гоночного дрона этого вполне хватит.
Никаких настроек не требуется, все будет работать при стандартном подключении камеры:
Какое OSD я использовал
Betaflight OSD
Встроенное OSD Betaflight очень удобное. Правда, использоваться должна прошивка Betaflight. Отсутствие необходимости прокладки проводов и что-то паять дает много плюсов в пользу этого выбора.
MinimOSD
MinimOSD (не путать с микро) — классная и мощная внешняя плата OSD, с помощью которой можно выводить практически любую информацию. Эта плата была лучшим моим выбором, пока не вышел полетный контроллер с встроенным OSD Betaflight. Плата поддерживает работу с различными ПК, например, Naze32, CC3D, Multiwii, APM и PixHaw. Требуется прошивка с помощью программатора ардуино.
MinimOSD Micro
Маленькая плата, которая умеет накладывать на видеопоток любую информацию с датчиков, которую предоставит полетный контроллер. Для прошивки тоже требуется программатор ардуино. Питается от 5V, поэтому не перепутайте контакты при подключении.
3 OSD выше — самые популярные у пилотов СНГ, их легко купить на Алиэкспресс или Банггуд. Ниже в пример приведем еще несколько для общего развития, но их купить сложнее и популярностью они не пользуются.
BrainFPV
BrainFPV — это полетный контроллер, у которого есть встроенное OSD. Хороший выбор для тех, кто не хочет заморачиваться с прошивкой платы и проводами. Всю настройку можно произвести из интерфейса управления полетным контроллером.
Skylark OSD
Skylark OSD — внешняя плата OSD с датчиком GPS. Умеет благодаря этому показывать координаты и прочую информацию с GPS, напряжение аккумулятора и таймер.
Это была моя первая плата OSD, тогда я искал такую, которую не нужно было подключать к полетному контроллеру, но, чтобы было GPS. Тогда эта плата отлично справлялась со своими задачами и всем меня устраивала. Плата идет в комплекте с модулем GPS и датчиком тока. Единственный минус — плата слишком большая для использования на гоночных дронах.
Super Simple OSD
Как следует из названия, это простейшая плата с OSD. Умеет показывать только таймер и напряжение аккумулятора. Работает с аккумуляторами до 4S.
Hobbyking E-OSD
Тоже простейшая плата OSD, умеет показывать только напряжение и таймер и работает только с аккумуляторами 2-3S. Ее можно прошить и тогда, используя 2 порт BAT2 (выход на второй аккумулятор), можно выводить данные RSSI.
Где купить OSD?
Как и все компоненты для сборки дронов, покупать OSD рекомендуем на Aliexpress и Banggood.
Телеметрия. Настройка модулей
Рассмотрим процесс настройки модулей телеметрии, которые будем подключать к контроллеру APM.
Для чего нужны модули телеметрии (или телеметрия), мы уже разобрались. Теперь, перед использованием, их необходимо настроить. Рассмотрим модули ближе.
Собранные модули выглядят следующим образом:  Наземный и бортовой модули (разъем PLS)
Наземный и бортовой модули (разъем PLS)  Бортовой (разъем DF-13) и наземный модули
Бортовой (разъем DF-13) и наземный модули
Один модуль имеет разъем USB для подключения к ПК, второй имеет разъем на контактах PLS или DF-13. 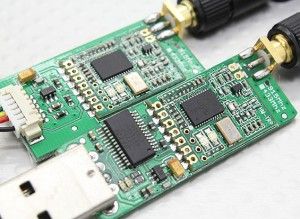 Модули крупным планом
Модули крупным планом
Модуль с USB имеет встроенный на плате адаптер USB-COM на, уже известной нам по предыдущим статьям, микросхеме FT232RL. На модуле с HobbyKing.com обнаружена поддельная микросхема, о чем свидетельствует отказ работы адаптера на свежих драйверах (о подделке впервые информация появилась на habrahabr.ru). В том числе и мне попался такой модуль. Но ничего страшного — надо всего лишь установить драйвер для Windows XP-7 x32 по-старее (версия 2.08.28), который можно скачать тут. Драйвер, который у меня заработал на Windows 8 x64, можно скачать тут. Также ссылка на официальный сайт производителя микросхемы.
Рассмотрим выводы на модуле, который будем устанавливать на коптер. 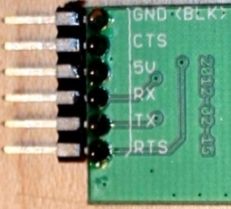 Выводы на модуле
Выводы на модуле
Настройка модулей осуществляется двумя способами:
1. Модуль с разъемом USB подключается к ПК, а для второго модуля нам необходим отдельный адаптер USB-COM (можно использовать все тот же, на микросхеме FT232RL, который мы уже использовали для прошивки контроллера). Если у вас нет адаптера (а он должен быть! :-)), то необходимо сначала воспользоваться вторым способом, чтобы не наломать дров (на самом деле ничего страшного, перед изменением каких-либо параметров всегда запоминаем/записываем что было ранее, чтобы была возможность вернуть все назад)!
2. Модуль с разъемом USB подключается к ПК, а на второй модуль подается только питание. Этот способ может быть использован для повторной настройки или, если нам повезло и, модули уже были ранее настроены на совместную работу друг с другом. Чтобы это проверить — необходимо подать питание на оба модуля (один подключаем к USB ПК, а на второй подаем 5В) и, если мы увидели, что на обоих модулях зеленые индикаторы горят, то значит модули уже были настроены на совместную работу. Процесс настройки можно упростить, настраивая оба модуля одновременно.
Опишу весь процесс настройки модулей с нуля.
Подключаем наземный модуль (с USB) к ПК, устанавливаем драйвер, смотрим и запоминаем номер COM порта в диспетчере устройств. Далее для настройки можно использовать утилиту 3DR Radio Configuration Utility или Mission Planner. Процесс настройки абсолютно идентичен. Для простоты настройку будем производить через Mission Planner. Запускаем его, выбираем нужный COM порт и скорость 57600 бод. Кнопку «Connect» нажимать не надо! 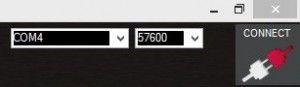 Выбор порта
Выбор порта
Переходим на вкладку «Initial Setup — Optional Hardware — 3DR Radio». Далее нажимаем кнопку «Load Settings» и ждем несколько секунд, пока настройки считаются. Если процесс не пошел, то попробуйте выбрать другую скорость и опять нажать кнопку. Если считать параметры так и не удается, то возможно «все плохо» и тогда в модулях необходимо обновить прошивку. Об этом я, возможно, напишу позже, но сейчас почитать о прошивке можно здесь и здесь.
После считывания увидим изображение, подобное этому:  Настройка модулей телеметрии
Настройка модулей телеметрии
После того, как указали все значения — нажимаем кнопку «Save Settings» для сохранения измененных параметров в модуле.
Далее необходимо настроить второй (бортовой) модуль. Производим подключение «один к одному» модуля и адаптера USB-COM (в моем случае FTDI). Самое важное, что необходимо — подать массу и плюс питания и правильно подключить RX и TX. 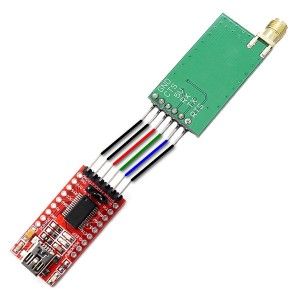 Модуль телеметрии и FTDI
Модуль телеметрии и FTDI
Производим все те же настройки для бортового модуля, что и для наземного, использую Mission Planner. Выставляем полностью такие же параметры и сохраняем. Еще проверим, чтобы у обоих модулей была одна и та же версия прошивки. Если это не так, то приступаем к обновлению на обоих модулях (см. ссылки выше).
Подаем питание на оба модуля (один подключаем к USB ПК, а на второй подаем 5В, можно оставить подключение через USB-COM адаптер) и, если мы увидели, что на обоих модулях зеленые индикаторы горят, то значит настройка прошла успешно.
Проверить модули на уровне передачи данных можно, подключившись программой-терминалом (например Hyper Terminal, Putty, SecureCRT) к COM порту (наземного модуля, подключенного к ПК). На бортовом модуле необходимо оставить питание и замкнуть RX и TX (от адаптера соответственно их лучше отсоединить), далее в программе необходимо получить «эхо» (echo), для чего достаточно начать печатать на клавиатуре и в окне терминала будет виден набираемый текст. При размыкании RX и TX соответственно текст набираться не будет.
Теперь, при подключенных обоих модулях, можно проверить работу передачи настроек от одного модуля к другому. Для наземного модуля измените какой-нибудь параметр, например «Net ID», нажмите кнопку «Copy Required Items to Remote», чтобы передать отличающиеся параметры, затем нажать кнопку «Save Settings».  Проверка передачи настроек
Проверка передачи настроек
В данной статье мы рассмотрели, как произвести настройку и проверку радио модулей, которые будем использовать для получения данных телеметрии контроллера APM. О подключении далее…
Update 09.09.2014: Важно учесть, что при настройке модулей, нельзя питать плату APM от USB ПК. Подробнее тут. Так же почитайте комментарии Михаила ниже.
Если вы нашли ошибку на странице, то нажмите Shift + Enter или нажмите здесь, чтобы уведомить нас.